加速度センサ
UNO
概要
加速度センサの特性を測る実験です。
KXM52-1050を利用した加速度センサモジュールを使いました。
目的
衝動買いをしてしまったので、今のところ特に目的はありません。単に特性を調べるだけです。
データシート
KXM52-1050のデータシートを参照してどのようなものなのかを調べました。
概要
KXM52-1050という加速度センサデバイスを使いやすくモジュール化したものです。
仕様の概要は以下の通りです。
| 項目 | 内容 |
|---|---|
| 電源電圧(Vdd) | 2.7V~5.5V(標準3.3V) |
| 測定レンジ | ±2g |
| 感度 | (Vdd/5) V/g |
| 0G出力 | (Vdd/2) V |
標準電圧は3.3Vとなっていますが、仕様の範囲内なので5Vで使いました。
出力電圧と加速度の関係
上記のデータより、出力電圧をv(V)、加速度をa(単位はg)とすると、出力電圧と加速度の関係は以下の数式であらわされます。
$$v = a \times Vdd / 5 + Vdd / 2$$例えば、Vddが5V、加速度が1gのときは、aに1を代入して、3.5Vの電圧が出力されることになります。
実験
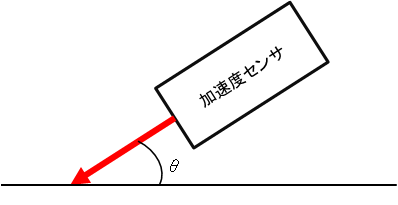
加速度センサを傾けていき、角度を変化させ、出力される電圧を測定しました。角度を変えるのは結構厄介だったので、三角定規で測れる、±30度、±45度、±60度と、0度、±90度での値を測定しました。0度のときに、0gとなるようにしました。下の図の赤矢印の方向の加速度です。また、加速度センサそのものは静止した状態で測定しました。
測定結果は以下の通りでした。
| -90度 | -60度 | -45度 | -30度 | 0度 | 30度 | 45度 | 60度 | 90度 | |
|---|---|---|---|---|---|---|---|---|---|
| 電圧(理論値) | 1.50 | 1.63 | 1.78 | 2.00 | 2.50 | 3.00 | 3.21 | 3.37 | 3.50 |
| 電圧(analogRead()より計算) | 1.41 | 1.55 | 1.72 | 1.95 | 2.50 | 3.05 | 3.28 | 3.43 | 3.58 |
| analogRead()の出力(理論値) | 307 | 335 | 367 | 410 | 512 | 614 | 657 | 689 | 717 |
| analogRead()の出力(実測値) | 289 | 318 | 353 | 399 | 511 | 624 | 672 | 702 | 733 |
比較的理論値に近い値が出ました。
電圧から角度への変換
加速度センサが静止した状態で、電圧(v)と角度(加速度センサの傾き)(θ)の関係は、以下のようになっています(入力電圧が5Vのとき)。
$$v = \sin θ + 2.5$$また、analogRead()の出力vと、角度(加速度センサの傾き)(θ)の関係は、以下のようになっています(入力電圧が5Vのとき)。
$$v = 204.8 \times \sin θ + 512$$このことから、analogRead()の出力から、角度を求めるためには、上の式を変形して、以下で求めることができます。
$$204.8\times \sin \theta = v - 512 → \\\\ \sin \theta = (v - 512) / 204.8 → \\\\ \theta = \arcsin ((v - 512) / 204.8)$$バージョン
| Hardware: | Arduino Uno |
| Software: | Arduino 0022 |
最終更新日
November 1, 2022